Презентация smart technology: Presentation on ICT SMART TECHNOLOGY доклад, проект
Presentation on ICT SMART TECHNOLOGY доклад, проект
- Главная
- Разное
- Образование
- Спорт
- Естествознание
- Природоведение
- Религиоведение
- Французский язык
- Черчение
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Геометрия
- Детские презентации
- Информатика
- История
- Литература
- Математика
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, фоны, картинки для презентаций
- Экономика
The plan of the lecture:Internet of Things. Big data.Artificial Intelligence.Technology Block Chain. Using Smart-services.Green Technology ICT. Teleconference. Telemedicine.
Big data.Artificial Intelligence.Technology Block Chain. Using Smart-services.Green Technology ICT. Teleconference. Telemedicine.
Smart Technology
Teacher: Ibraimova Assel
The plan of the lecture:
Internet of Things. Big data.
Artificial Intelligence.
Technology Block Chain. Using Smart-services.
Green Technology ICT. Teleconference. Telemedicine.
Glossary:
Brief description of terms:
Green Technology — Innovation, which are based on the principles of sustainable development and re-use of resources.

Appointment of smart cards — one-and two-factor user authentication, storage of key information.
Artificial Intelligence (AI English Artificial intelligence, AI.) — Science and technology to create intelligent machines, especially intelligent computer programs.
Smart Technologies introduced the first Smart Board interactive whiteboard in 1991. It was the first interactive whiteboard to provide touch control of computer applications and annotation over standard Microsoft Windows applications. In 2003, Smart developed and later patented DViT (Digital Vision Touch) technology. This camera-based touch technology for interactive whiteboards and interactive displays uses digital cameras and proprietary software and firmware to detect finger or pen contact with the screen. That contact is then interpreted as finger or pen activity.
As of fiscal year end 2010, Smart Technologies holds more than 150 issued patents with more than 600 patents pending. In 2011, Smart Technologies celebrated the 20th anniversary of the Smart Board interactive whiteboard, which coincided with the installation of the two millionth interactive whiteboard. As of October 2011, Smart employs more than 1,700 people. Smart products are sold through dealers across North America and through distributors in countries around the world.
In 2011, Smart Technologies celebrated the 20th anniversary of the Smart Board interactive whiteboard, which coincided with the installation of the two millionth interactive whiteboard. As of October 2011, Smart employs more than 1,700 people. Smart products are sold through dealers across North America and through distributors in countries around the world.
Smart Technologies is a publicly traded company headquartered in Calgary, Alberta, Canada. In 1992, Smart formed a strategic alliance with Intel Corparation which resulted in joint product development and marketing efforts and Intel’s ongoing equity ownership in Smart.
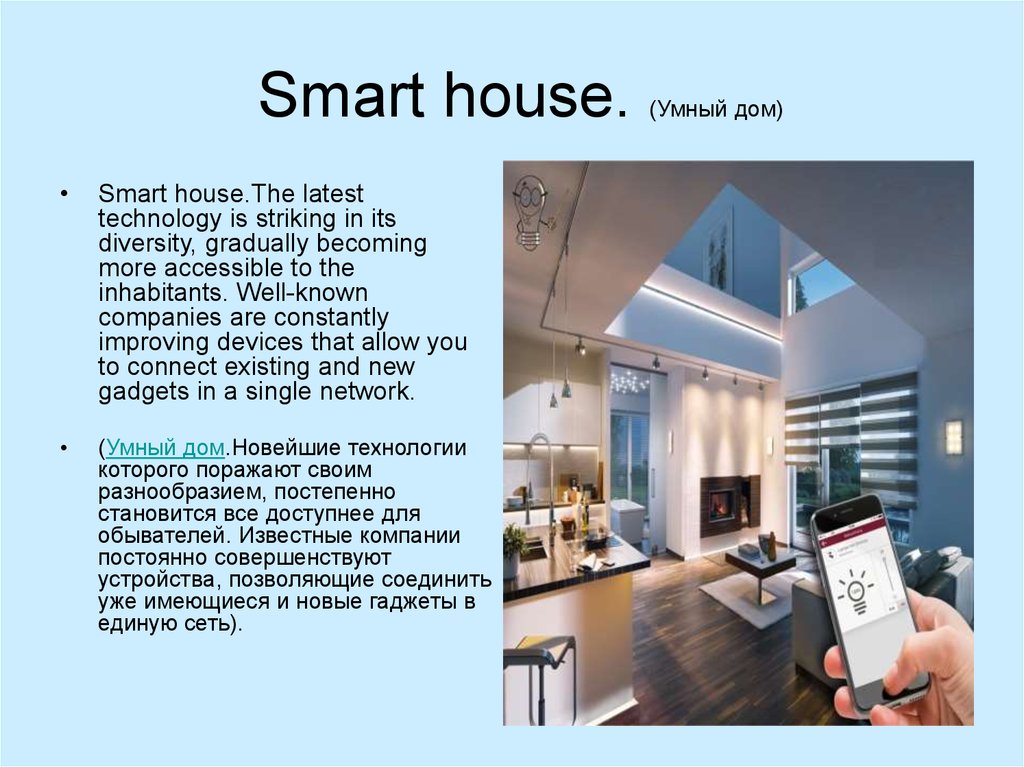
Smart home — Home automation is the residential extension of building automation and involves the control and automation of lighting, heating, ventilation, air conditioning, appliances, and security. Modern systems generally consist of switches and sensors connected to a central hub sometimes called a «gateway» from which the system is controlled with a user interface that is interacted either with a wall-mounted terminal, mobile phone software, tablet computer or a web interface.
Modern systems generally consist of switches and sensors connected to a central hub sometimes called a «gateway» from which the system is controlled with a user interface that is interacted either with a wall-mounted terminal, mobile phone software, tablet computer or a web interface.
The first Smart TV related patent was filed in 1994, though it’s only in the last 5 years. Smart TV refers to a trend of integrating Internet-connected technologies into a TV set; a convergence of computer-like features. Smart TVs may have one or more of the following features:
Video Playback Via DLNA/USB.
Apps & Games;
Gesture & Voice Control;
Social Networking;
Web Browsing;
Smartphone Connectivity;
Smart Hub provides utility and telecommunications customers account management at their fingertips. Customers can view their usage and billing, manage payments, notify customer service of account and service issues and receive special messaging from their local utility or telecommunications company.
Customers can view their usage and billing, manage payments, notify customer service of account and service issues and receive special messaging from their local utility or telecommunications company.
Additional Features:
My Usage
Contact Us
News
Service Status
Maps
Questions for self-control:
Define Smart technology?
What is Smart Home?
What are the advantage and disadvantage smart board technology ?
Reference:
Alekseeva LN Innovative Technologies as a resource for the experiment / LN Alekseeva // teacher. — 2004. — № 3. — p. 78.
Bychkov, AV innovative culture / AV Bychkov // profile school. — 2005. — № 6. — p. 83.
Deberdeeva, TH new value of education in the information society / TH Deberdeeva // Innovations in Education. — 2005. — № 3. — p. 79.
Kvasha VP management of innovative processes in education. Dis. cand. ped. Sciences. Moscow, 1994. — 345s.
Dis. cand. ped. Sciences. Moscow, 1994. — 345s.
Slastenin VA Podymova LS Pedagogy: innovation M .: IPE «Publisher Masters» 1997. — 456s.
Slastenin VA etc. Education:. Proc. allowance for students. Executive. ped. Proc. institutions / VA Slastenin, JF Isayev, EN Shiyanov; Ed. VA Slastenina. — M .: Publishing Center «Academy», 2002. — 576s.
Скачать презентацию
Что такое shareslide.ru?
Это сайт презентаций, где можно хранить и обмениваться своими презентациями, докладами, проектами, шаблонами в формате PowerPoint с другими пользователями. Мы помогаем школьникам, студентам, учителям, преподавателям хранить и обмениваться учебными материалами.
Для правообладателей
Обратная связь
Email: Нажмите что бы посмотреть
Smart Technologies. Automation and Robotics презентация, доклад
Smart Technologies
Automation and Robotics
Motivation
Intelligent Environments are aimed at improving the inhabitants’ experience and task performance
Automate functions in the home
Provide services to the inhabitants
Decisions coming from the decision maker(s) in the environment have to be executed.
Decisions require actions to be performed on devices
Decisions are frequently not elementary device interactions but rather relatively complex commands
Decisions define set points or results that have to be achieved
Decisions can require entire tasks to be performed
Automation and Robotics in Intelligent Environments
Control of the physical environment
Automated blinds
Thermostats and heating ducts
Automatic doors
Automatic room partitioning
Personal service robots
House cleaning
Lawn mowing
Assistance to the elderly and handicapped
Office assistants
Security services
Robots
Robota (Czech) = A worker of forced labor
From Czech playwright Karel Capek’s 1921 play “R.U.R” (“Rossum’s Universal Robots”)
“A device with degrees of freedom that can be controlled.
 ”
”Class 1 : Manual handling device
Class 2 : Fixed sequence robot
Class 3 : Variable sequence robot
Class 4 : Playback robot
Class 5 : Numerical control robot
Class 6 : Intelligent robot
A Brief History of Robotics
Mechanical Automata
Ancient Greece & Egypt
Water powered for ceremonies
14th – 19th century Europe
Clockwork driven for entertainment
Motor driven Robots
1928: First motor driven automata
1961: Unimate
First industrial robot
1967: Shakey
Autonomous mobile research robot
1969: Stanford Arm
Dextrous, electric motor driven robot arm
Maillardet’s Automaton
Unimate
Robots
Robot Manipulators
Mobile Robots
Robots
Walking Robots
Humanoid Robots
Autonomous Robots
The control of autonomous robots involves a number of subtasks
Understanding and modeling of the mechanism
Kinematics, Dynamics, and Odometry
Reliable control of the actuators
Closed-loop control
Generation of task-specific motions
Path planning
Integration of sensors
Selection and interfacing of various types of sensors
Coping with noise and uncertainty
Filtering of sensor noise and actuator uncertainty
Creation of flexible control policies
Control has to deal with new situations
Traditional Industrial Robots
Traditional industrial robot control uses robot arms and largely pre-computed motions
Repetitive tasks
High speed
Few sensing operations
High precision movements
Pre-planned trajectories and
task policies
No interaction with humans
Problems
Traditional programming techniques for industrial robots lack key capabilities necessary in intelligent environments
Only limited on-line sensing
No incorporation of uncertainty
No interaction with humans
Reliance on perfect task information
Complete re-programming for new tasks
Requirements for Robots in Intelligent Environments
Autonomy
Robots have to be capable of achieving task objectives without human input
Robots have to be able to make and execute their own decisions based on sensor information
Intuitive Human-Robot Interfaces
Use of robots in smart homes can not require extensive user training
Commands to robots should be natural for inhabitants
Adaptation
Robots have to be able to adjust to changes in the environment
Robots for Intelligent Environments
Service Robots
Security guard
Delivery
Cleaning
Mowing
Assistance Robots
Mobility
Services for elderly and
People with disabilities
Autonomous Robot Control
To control robots to perform tasks autonomously a number of tasks have to be addressed:
Modeling of robot mechanisms
Kinematics, Dynamics
Robot sensor selection
Active and passive proximity sensors
Low-level control of actuators
Closed-loop control
Control architectures
Traditional planning architectures
Behavior-based control architectures
Hybrid architectures
Forward kinematics describes how the robots joint angle configurations translate to locations in the world
Inverse kinematics computes the joint angle configuration necessary to reach a particular point in space.
Jacobians calculate how the speed and configuration of the actuators translate into velocity of the robot
Modeling the Robot Mechanism
In mobile robots the same configuration in terms of joint angles does not identify a unique location
To keep track of the robot it is necessary to incrementally update the location (this process is called odometry or dead reckoning)
Example: A differential drive robot
Mobile Robot Odometry
φR
φL
Actuator Control
To get a particular robot actuator to a particular location it is important to apply the correct amount of force or torque to it.
Requires knowledge of the dynamics of the robot
Mass, inertia, friction
For a simplistic mobile robot: F = m a + B v
Frequently actuators are treated as if they were independent (i.e. as if moving one joint would not affect any of the other joints).
The most common control approach is PD-control (proportional, differential control)
For the simplistic mobile robot moving in the x direction:
Robot Navigation
Path planning addresses the task of computing a trajectory for the robot such that it reaches the desired goal without colliding with obstacles
Optimal paths are hard to compute in particular for robots that can not move in arbitrary directions (i.e. nonholonomic robots)
Shortest distance paths can be dangerous since they always graze obstacles
Paths for robot arms have to take into account the entire robot (not only the endeffector)
Sensor-Driven Robot Control
To accurately achieve a task in an intelligent environment, a robot has to be able to react dynamically to changes ion its surrounding
Robots need sensors to perceive the environment
Most robots use a set of different sensors
Different sensors serve different purposes
Information from sensors has to be integrated into the control of the robot
Robot Sensors
Internal sensors to measure the robot configuration
Encoders measure the rotation angle of a joint
Limit switches detect when the joint has reached the limit
Robot Sensors
Proximity sensors are used to measure the distance or location of objects in the environment. This can then be used to determine the location of the robot.
This can then be used to determine the location of the robot.
Infrared sensors determine the distance to an object by measuring the amount of infrared light the object reflects back to the robot
Ultrasonic sensors (sonars) measure the time that an ultrasonic signal takes until it returns to the robot
Laser range finders determine distance by
measuring either the time it takes for a laser
beam to be reflected back to the robot or by
measuring where the laser hits the object
Computer Vision provides robots with the capability to passively observe the environment
Stereo vision systems provide complete location information using triangulation
However, computer vision is very complex
Correspondence problem makes stereo vision even more difficult
Robot Sensors
Uncertainty in Robot Systems
Robot systems in intelligent environments have to deal with sensor noise and uncertainty
Sensor uncertainty
Sensor readings are imprecise and unreliable
Non-observability
Various aspects of the environment can not be observed
The environment is initially unknown
Action uncertainty
Actions can fail
Actions have nondeterministic outcomes
Probabilistic Robot Localization
Explicit reasoning about Uncertainty using Bayes filters:
Used for:
Localization
Mapping
Model building
Deliberative
Robot Control Architectures
In a deliberative control architecture the robot first plans a solution for the task by reasoning about the outcome of its actions and then executes it
Control process goes through a sequence of sencing, model update, and planning steps
Deliberative
Control Architectures
Advantages
Reasons about contingencies
Computes solutions to the given task
Goal-directed strategies
Problems
Solutions tend to be fragile in the presence of uncertainty
Requires frequent replanning
Reacts relatively slowly to changes and unexpected occurrences
Behavior-Based
Robot Control Architectures
In a behavior-based control architecture the robot’s actions are determined by a set of parallel, reactive behaviors which map sensory input and state to actions.
Behavior-Based
Robot Control Architectures
Reactive, behavior-based control combines relatively simple behaviors, each of which achieves a particular subtask, to achieve the overall task.
Robot can react fast to changes
System does not depend on complete knowledge of the environment
Emergent behavior (resulting from combining initial behaviors) can make it difficult to predict exact behavior
Difficult to assure that the overall task is achieved
Complex behavior can be achieved using very simple control mechanisms
Braitenberg vehicles: differential drive mobile robots with two light sensors
Complex external behavior does not necessarily require a complex reasoning mechanism
Complex Behavior from Simple Elements: Braitenberg Vehicles
“Coward”
“Aggressive”
“Love”
“Explore”
Behavior-Based Architectures: Subsumption Example
Subsumption architecture is one of the earliest behavior-based architectures
Behaviors are arranged in a strict priority order where higher priority behaviors subsume lower priority ones as long as they are not inhibited.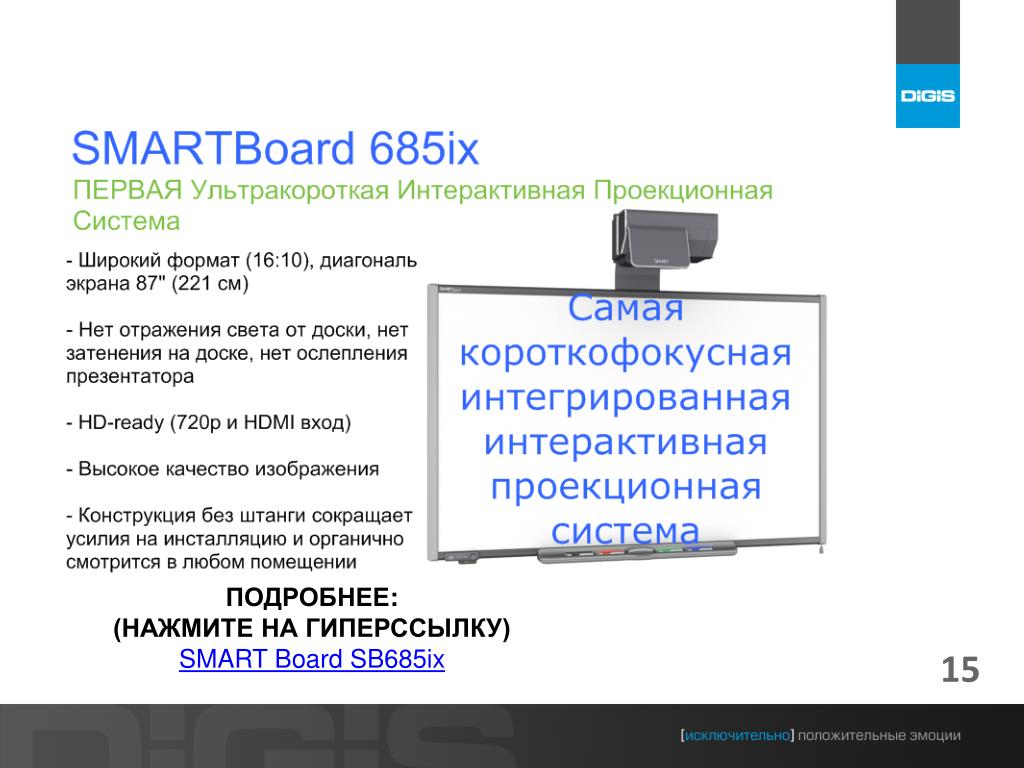
Subsumption Example
A variety of tasks can be robustly performed from a small number of behavioral elements
© MIT AI Lab
http://www-robotics.usc.edu/~maja/robot-video.mpg
Reactive, Behavior-Based
Control Architectures
Advantages
Reacts fast to changes
Does not rely on accurate models
“The world is its own best model”
No need for replanning
Problems
Difficult to anticipate what effect combinations of behaviors will have
Difficult to construct strategies that will achieve complex, novel tasks
Requires redesign of control system for new tasks
Hybrid Control Architectures
Hybrid architectures combine reactive control with abstract task planning
Abstract task planning layer
Deliberative decisions
Plans goal directed policies
Reactive behavior layer
Provides reactive actions
Handles sensors and actuators
Hybrid Control Policies
Task Plan:
Behavioral
Strategy:
Example Task:
Changing a Light Bulb
Hybrid Control Architectures
Advantages
Permits goal-based strategies
Ensures fast reactions to unexpected changes
Reduces complexity of planning
Problems
Choice of behaviors limits range of possible tasks
Behavior interactions have to be well modeled to be able to form plans
Traditional Human-Robot Interface: Teleoperation
Remote Teleoperation: Direct operation of the robot by the user
User uses a 3-D joystick or an exoskeleton to drive the robot
Simple to install
Removes user from dangerous areas
Problems:
Requires insight into the mechanism
Can be exhaustive
Easily leads to operation errors
Human-Robot Interaction in Intelligent Environments
Personal service robot
Controlled and used by untrained users
Intuitive, easy to use interface
Interface has to “filter” user input
Eliminate dangerous instructions
Find closest possible action
Receive only intermittent commands
Robot requires autonomous capabilities
User commands can be at various levels of complexity
Control system merges instructions and autonomous operation
Interact with a variety of humans
Humans have to feel “comfortable” around robots
Robots have to communicate intentions in a natural way
Example: Minerva the Tour Guide Robot (CMU/Bonn)
© CMU Robotics Institute
http://www. cs.cmu.edu/~thrun/movies/minerva.mpg
cs.cmu.edu/~thrun/movies/minerva.mpg
Intuitive Robot Interfaces:
Command Input
Graphical programming interfaces
Users construct policies form elemental blocks
Problems:
Requires substantial understanding of the robot
Deictic (pointing) interfaces
Humans point at desired targets in the world or
Target specification on a computer screen
Problems:
How to interpret human gestures ?
Voice recognition
Humans instruct the robot verbally
Problems:
Speech recognition is very difficult
Robot actions corresponding to words has to be defined
Intuitive Robot Interfaces:
Robot-Human Interaction
He robot has to be able to communicate its intentions to the human
Output has to be easy to understand by humans
Robot has to be able to encode its intention
Interface has to keep human’s attention without annoying her
Robot communication devices:
Easy to understand computer screens
Speech synthesis
Robot “gestures”
Example: The Nursebot Project
© CMU Robotics Institute
http://www/cs/cmu. edu/~thrun/movies/pearl_assist.mpg
edu/~thrun/movies/pearl_assist.mpg
Human-Robot Interfaces
Existing technologies
Simple voice recognition and speech synthesis
Gesture recognition systems
On-screen, text-based interaction
Research challenges
How to convey robot intentions ?
How to infer user intent from visual observation (how can a robot imitate a human) ?
How to keep the attention of a human on the robot ?
How to integrate human input with autonomous operation ?
Integration of Commands and Autonomous Operation
Adjustable Autonomy
The robot can operate at varying levels of autonomy
Operational modes:
Autonomous operation
User operation / teleoperation
Behavioral programming
Following user instructions
Imitation
Types of user commands:
Continuous, low-level instructions (teleoperation)
Goal specifications
Task demonstrations
Example System
«Social» Robot Interactions
To make robots acceptable to average users they should appear and behave “natural”
«Attentional» Robots
Robot focuses on the user or the task
Attention forms the first step to imitation
«Emotional» Robots
Robot exhibits “emotional” responses
Robot follows human social norms for behavior
Better acceptance by the user (users are more forgiving)
Human-machine interaction appears more “natural”
Robot can influence how the human reacts
«Social» Robot Example: Kismet
© MIT AI Lab
http://www.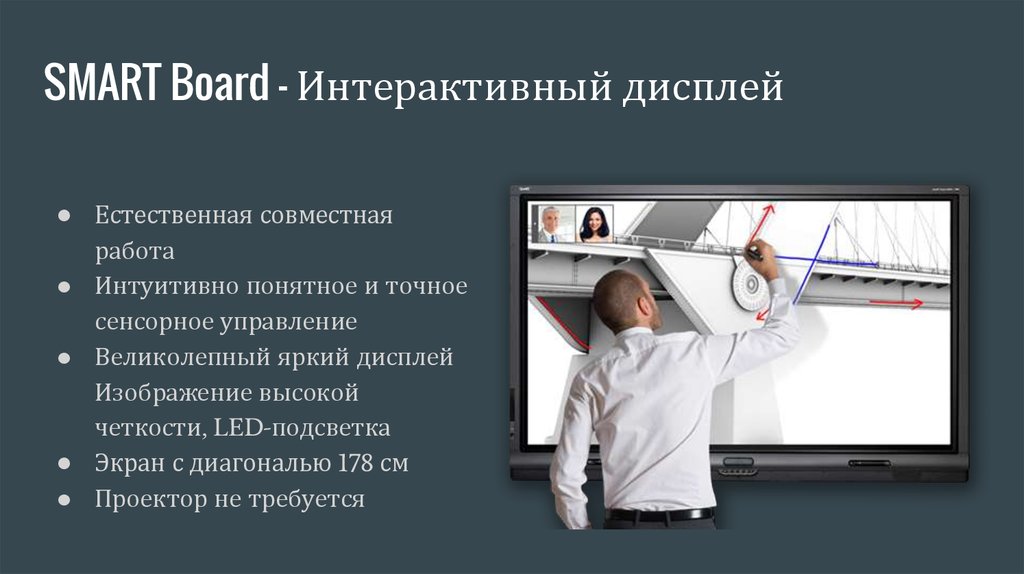 ai.mit.edu/projects/cog/Video/kismet/kismet_face_30fps.mpg
ai.mit.edu/projects/cog/Video/kismet/kismet_face_30fps.mpg
«Social» Robot Interactions
Advantages:
Robots that look human and that show “emotions” can make interactions more “natural”
Humans tend to focus more attention on people than on objects
Humans tend to be more forgiving when a mistake is made if it looks “human”
Robots showing “emotions” can modify the way in which humans interact with them
Problems:
How can robots determine the right emotion ?
How can “emotions” be expressed by a robot ?
Human-Robot Interfaces for Intelligent Environments
Robot Interfaces have to be easy to use
Robots have to be controllable by untrained users
Robots have to be able to interact not only with their owner but also with other people
Robot interfaces have to be usable at the human’s discretion
Human-robot interaction occurs on an irregular basis
Frequently the robot has to operate autonomously
Whenever user input is provided the robot has to react to it
Interfaces have to be designed human-centric
The role of the robot is it to make the human’s life easier and more comfortable (it is not just a tech toy)
Intelligent Environments are non-stationary and change frequently, requiring robots to adapt
Adaptation to changes in the environment
Learning to address changes in inhabitant preferences
Robots in intelligent environments can frequently not be pre-programmed
The environment is unknown
The list of tasks that the robot should perform might not be known beforehand
No proliferation of robots in the home
Different users have different preferences
Adaptation and Learning for Robots in Smart Homes
Adaptation and Learning
In Autonomous Robots
Learning to interpret sensor information
Recognizing objects in the environment is difficult
Sensors provide prohibitively large amounts of data
Programming of all required objects is generally not possible
Learning new strategies and tasks
New tasks have to be learned on-line in the home
Different inhabitants require new strategies even for existing tasks
Adaptation of existing control policies
User preferences can change dynamically
Changes in the environment have to be reflected
Learning Approaches for Robot Systems
Supervised learning by teaching
Robots can learn from direct feedback from the user that indicates the correct strategy
The robot learns the exact strategy provided by the user
Learning from demonstration (Imitation)
Robots learn by observing a human or a robot perform the required task
The robot has to be able to “understand” what it observes and map it onto its own capabilities
Learning by exploration
Robots can learn autonomously by trying different actions and observing their results
The robot learns a strategy that optimizes reward
Learning Sensory Patterns
Chair
Learning to Identify Objects
How can a particular object be recognized ?
Programming recognition strategies is difficult because we do not fully understand how we perform recognition
Learning techniques permit the robot system to form its own recognition strategy
Supervised learning can be used by giving the robot a set of pictures and the corresponding classification
Neural networks
Decision trees
Learning Task Strategies by Experimentation
Autonomous robots have to be able to learn new tasks even without input from the user
Learning to perform a task in order to optimize the reward the robot obtains (Reinforcement Learning)
Reward has to be provided either by the user or the environment
Intermittent user feedback
Generic rewards indicating unsafe or inconvenient actions or occurrences
The robot has to explore its actions to determine what their effects are
Actions change the state of the environment
Actions achieve different amounts of reward
During learning the robot has to maintain a level of safety
Example: Reinforcement Learning in a Hybrid Architecture
Policy Acquisition Layer
Learning tasks without supervision
Abstract Plan Layer
Learning a system model
Basic state space compression
Reactive Behavior Layer
Initial competence and reactivity
Example Task:
Learning to Walk
Scaling Up: Learning Complex Tasks from Simpler Tasks
Complex tasks are hard to learn since they involve long sequences of actions that have to be correct in order for reward to be obtained
Complex tasks can be learned as shorter sequences of simpler tasks
Control strategies that are expressed in terms of subgoals are more compact and simpler
Fewer conditions have to be considered if simpler tasks are already solved
New tasks can be learned faster
Hierarchical Reinforcement Learning
Learning with abstract actions
Acquisition of abstract task knowledge
Example: Learning to Walk
Conclusions
Robots are an important component in Intelligent Environments
Automate devices
Provide physical services
Robot Systems in these environments need particular capabilities
Autonomous control systems
Simple and natural human-robot interface
Adaptive and learning capabilities
Robots have to maintain safety during operation
While a number of techniques to address these requirements exist, no functional, satisfactory solutions have yet been developed
Only very simple robots for single tasks in intelligent environments exist
Smart Technologies Шаблон PowerPoint, фоны и слайды Google — ID 0000003955
С шаблоном вы также получите:
С шаблоном вы также получите:
Вместе с шаблоном вы также получаете:
610 слайдов — анимированные Инфографические слайды
 youtube.com/embed/zqRThVvqJQw?rel=0&controls=1″ frameborder=»0″ allow=»autoplay; encrypted-media» allowfullscreen=»»>
youtube.com/embed/zqRThVvqJQw?rel=0&controls=1″ frameborder=»0″ allow=»autoplay; encrypted-media» allowfullscreen=»»> Купить 3 слайда:
16,99 $
Добавить в корзину
Получите мгновенный доступ к этой эксклюзивной презентации 2778 Слайды:
Master, Title and Print (+73 диаграмма слайды)
Медицинская инфографика (108 слайдов) БЕСПЛАТНЫЙ БОНУС
Набор презентаций с инфографикой (2618 слайдов)
Анимированная инфографика (610 слайдов)
Поддерживаемое программное обеспечение: PowerPoint 2010, 2013,
2016, 2019, 365;
открытый офис; Гугл слайды.
23,99 $
Добавить в корзину
Поделись со всем миром:
Особенности шаблона:
2778 / Слайды
Инфографика и диаграммы
610 / Слайды
Анимированная инфографика
54 / Слайды
Слайды медицинской инфографики
Соотношение сторон: 16:9, 4:3, 16:10
Формы: полностью редактируемая векторная графика
Скачать файл: ZIP-файл
Поддержка перетаскивания
Изменение размера графики без потери качества
Этот набор обновляется, все новые обновления доступны для вас бесплатно.
На основе заполнителей
Креативные и четкие слайды
Все слайды сделаны с красочными темами
Почему SmileTemplates ?
Помощь тысячам организаций в проведении презентаций
10 лет в бизнесе 2,5 миллиона клиентов по всему миру в восторге
Остались вопросы? Мы здесь, чтобы помочь.
Часто задаваемые вопросы
Найдите свой ответЖивой чат
Прямой разговорСвяжитесь с нами
Рад ответить на любой ваш вопрос
Умные технологии Шаблоны презентаций PowerPoint Автор: RENURE Добавить в корзину
Дополнительная информация
Лицензирование: Полная лицензия, одно рабочее место
*Пожалуйста, свяжитесь с нами для получения лицензии на несколько рабочих мест
Типы файлов: PPT
Вдохновение
Мир технологий движется слишком быстро. В этой быстро меняющейся и высоконагруженной среде каждая коммунальная служба ориентируется на будущее интеллектуальных технологий. Информация лежит в основе этой революции интеллектуальных вычислений, в ходе которой используются тщательно отфильтрованные формы данных для создания будущих устройств, которые действительно являются высокотехнологичными. С помощью IoT (Интернета вещей) предприятия и службы также стремятся обеспечить высокоиндивидуализированный опыт, обеспечиваемый интеллектуальными технологиями. Этот шаблон всесторонне охватывает все аспекты информационных технологий, что дает вам преимущество во всех ваших начинаниях в области ИТ-бизнеса.
В этой быстро меняющейся и высоконагруженной среде каждая коммунальная служба ориентируется на будущее интеллектуальных технологий. Информация лежит в основе этой революции интеллектуальных вычислений, в ходе которой используются тщательно отфильтрованные формы данных для создания будущих устройств, которые действительно являются высокотехнологичными. С помощью IoT (Интернета вещей) предприятия и службы также стремятся обеспечить высокоиндивидуализированный опыт, обеспечиваемый интеллектуальными технологиями. Этот шаблон всесторонне охватывает все аспекты информационных технологий, что дает вам преимущество во всех ваших начинаниях в области ИТ-бизнеса.
Технические характеристики
- Более 70 уникальных слайдов
- Файл .PPTX
- Полностью редактируемые градиенты
- Высокое разрешение
- Последние использованные цвета градиента
- Векторная графика
- Подходит для печати
- Используемые бесплатные шрифты
- Справочный документ
- Работает на версиях MS Office 2010, 2013, O365, 2016, 2018
- Гранулированная группировка
- Неанимированные слайды
- Соотношение экрана 16:9
- Круглосуточная служба поддержки
- Дисплей Retina Дружественный
- Мобильный редактируемый
- Основной шаблон на основе
- Индивидуальное брендирование Возможно
- Фиксированные соотношения сторон для удобного масштабирования
- Изменение цвета одним щелчком мыши
- Изменить соотношение сторон экрана без потери качества
- Легкая смена шрифта
Описание продукта
Шаблон PowerPoint Smart Technology предназначен для демонстрации новейших достижений в мире ИТ с помощью мощной графики и значков. Быстрая отрасль, такая как ИТ, претерпевает метаморфозы, когда умные решения и еще более умная коммуникация являются ключом к успеху. Этот шаблон извлекает лучшую графику для каждого из элементов, упомянутых ниже:
Быстрая отрасль, такая как ИТ, претерпевает метаморфозы, когда умные решения и еще более умная коммуникация являются ключом к успеху. Этот шаблон извлекает лучшую графику для каждого из элементов, упомянутых ниже:
- Центр обработки данных
- Серверы
- Облачные вычисления
- Управление базой данных
- Бизнес-аналитика
- Интеллектуальный анализ данных
- Блокчейн
- Беспроводная сеть
- Цифровая технология Изометрия
- Облачное хранилище
- Электронные изометрические устройства
- Разработка программного обеспечения и программирование
- Разработка приложений и веб-сайтов
Преимущества Smart Technology Шаблон PowerPoint
- Дополнительные опции и элементы
- Новейший дизайн в холодных тонах
- Простота загрузки и использования
- Эффектные презентации, которые помогут вам выступать на профессиональном уровне
- Базовые знания PowerPoint достаточны для реализации шаблона
- Профессиональная колода, разработанная с учетом конкретных технологий, за считанные минуты
- Индивидуальные настройки доступны по запросу
- Купить один раз, использовать неограниченное количество раз
- Получите приоритетную поддержку по телефону, электронной почте, в чате, Skype или TeamViewer
Лучше всего подходит для :
Шаблон Smart Technology чрезвычайно полезен для ИТ-консультантов, руководителей проектов, архитекторов решений, ИТ-маркетологов и ИТ-экспертов. Шаблон полностью редактируемый и может быть настроен в соответствии с отраслью и требованиями. Он находит применение в различных отраслях для компаний, занимающихся ИТ, банковским делом, финансами, мобильностью, решениями SaaS, решениями PaaS. Помимо этого, он также полезен для хостинговых компаний, компаний по разработке мобильных приложений, стартапов Fintech, компании по созданию веб-приложений, компании по производству мобильных компьютеров, технологических компаний и стартапов.
Шаблон полностью редактируемый и может быть настроен в соответствии с отраслью и требованиями. Он находит применение в различных отраслях для компаний, занимающихся ИТ, банковским делом, финансами, мобильностью, решениями SaaS, решениями PaaS. Помимо этого, он также полезен для хостинговых компаний, компаний по разработке мобильных приложений, стартапов Fintech, компании по созданию веб-приложений, компании по производству мобильных компьютеров, технологических компаний и стартапов.
Автор РЕНЮР в шаблонах/презентациях
20,00 $
5,0
на основании отзывов
3
купить сейчас
Дополнительная информация
Лицензирование: Полная лицензия, одно рабочее место
* Пожалуйста, свяжитесь с нами для лицензирования нескольких рабочих мест
Типы файлов: PPT
Ознакомьтесь с другими нашими популярными ресурсами по графическому дизайну и рукоделию.